ساخت سری اتومبیل RC خودران #2-راه اندازی سخت افزار
ساخت سری اتومبیل RC خودران #2-راه اندازی سخت افزار
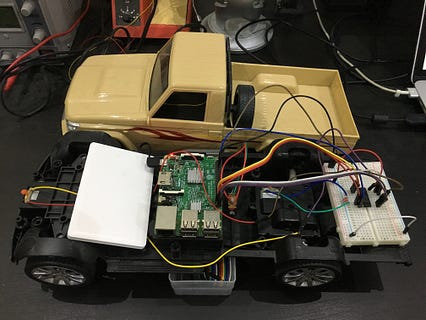
در قسمت دوم این مجموعه ، به تنظیم سخت افزار می پردازیم. در RC Car من دو موتور دارم ، جلو برای کنترل چپ/راست و عقب که حرکت رو به جلو/عقب را کنترل می کند.
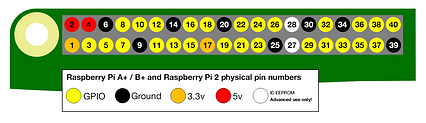
از Raspberry Pi شروع کنید ، شکل زیر نمودار پینوتو Raspberry Pi را نشان می دهد که در آن می خواهید سیمها را از طریق L293d به موتور وصل کنید. L293d شامل دو پل H کامل است که به ما امکان می دهد دو موتور DC را به صورت دو طرفه کنترل کنیم. برای سازگاری هنگام بررسی تنظیمات نرم افزار ، از این پین ها (40 ، 38 ، 36) برای موتور جلو و پین ها (37 ، 35 ، 33) برای عقب استفاده می کنیم. اگر می دانید در حال انجام چه کاری هستید ، آنها را به هر چیزی که ترجیح می دهید تغییر دهید.
 https://goo.gl/FSSnVv
https://goo.gl/FSSnVv  شکل شما را نشان می دهد چگونه می توان دو موتور خود را با Raspberry Pi از طریق L293d
شکل شما را نشان می دهد چگونه می توان دو موتور خود را با Raspberry Pi از طریق L293d برنامه
1- تجهیزات و طرح
2- راه اندازی سخت افزار (این پست)
3- کنترل دستی با استفاده از Raspberry Pi & Python
4- همه چیز در محل
5- کنترل بدون سرور با استفاده از Computer Vision
رفتن به قسمت 3👇

 img src = "https://cdn-images-1.medium.com/max/426/1*v-PpfkSWHbvlWWamSVHHWg.png">
img src = "https://cdn-images-1.medium.com/max/426/1*v-PpfkSWHbvlWWamSVHHWg.png"> 
چگونه بنتلی خود را به عنوان برترین مارک خودروهای لوکس بازاریابی می کند
[ بازدید : 22 ] [ امتیاز : 3 ] [ نظر شما : ]